The Inevitability of Possible Worlds: Modular Models
Basic and Mkrtychev models were originally confined to a single possible world, which is sufficient to provide a countermodel for any nontheorem of a given justification logic (cf.
the completeness Theorem 3.6). But this does not suffice for capturing the intrinsic epistemic structure of situations that naturally include possible worlds. We look at some examples involving possible worlds. These examples can, for the time being, be understood informally.Example 3.25 Suppose a proposition P holds at Γ, but is not known to an agent due to lack of evidence. In addition, the agent deems possible a world A at which P is true and supported by a convincing justification, which we designate by x. A natural epistemic model could be M1, shown in Figure 3.1,
3.6 The Inevitability of Possible Worlds: Modular Models
43
with two possibly reflexive worlds Γ and A such that A is accessible from Γ, with P holding at Γ and A. Thus we do not have t:P holding at Γ for any t, but we do have x.P being true at A.
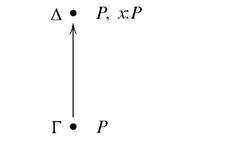
Figure 3.1 Model Mi

importance, but let us assume the underlying justification logic is JT. In M1, P holds at both Γ and A, and according to Kripke-Hintikka epistemology, P is believed in M1. So, at Γ, proposition P is believed but not justified. However, at Γ proposition P is believed without evidence, which exists only at A.
The worlds Γ and A are essentially basic models, which we can identify with maximal consistent sets Γmax and Amax of formulas true at the corresponding worlds, and these are classically maximal consistent sets.
However, Γmax and
So, introducing possible worlds into the semantic consideration of justification logics is inevitable. Possible world frames with accessibility relations directly relate justification logics to modal logics. Note, however, that an accessibility relation between possible worlds makes sense also outside a modal logic context. In model M1, there are no modalities present, but nevertheless, it makes perfect sense to model epistemic possibilities there.
How should we connect justification logic with mainstream epistemic logic, which relies heavily on possible worlds models? The standard semantics of
F is believed at world u
is
F holds at all worlds considered possible at u.
How can justifications be made to fit into this picture? The idea is to formally associate a basic model with each possible world of a frame, so that the interpretation of justification terms can vary from world to world.
Definition 3.26 A modular model is a structure
that is, if X is true in the modular model associated with world Γ.
This definition of modular models combines basic models with possible worlds frames without any constraints. Basic models at worlds may have different closure conditions, or may have none. Justifications are not yet linked to the epistemic modalities, which are implicitly present in modular models via accessibility relations.
It immediately follows from Corollary 3.11 that J is sound and complete with respect to modular J-models.
The notion of a modular model naturally extends to other justification logics, e.g., J4, J5, JT, LP (cf. Artemov, 2012; Kuznets and Goetschi, 2012).
Example 3.28 Figure 3.2 shows an example, of a JT-model and its epistemic reading.
In M2, x is a justification of P at Γ, but the agent does not believe P at Γ because there is a possible world A at which P does not hold. So, at Γ, P is justified, but not believed.
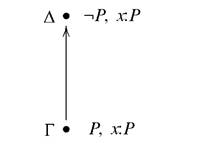
Figure 3.2 Model M2
3.7