The Solow Model with Human Capital
Before discussing further applications of the Solow model to the data, let us enrich the model by including human capital. Human capital is a term we use to represent the stock of skills, education, competencies and other productivity-enhancing characteristics embedded in labor.
Put differently, human capital represents the efficiency units of labor embedded in raw labor hours.The notion of human capital will be discussed in greater detail in Chapter 10 below, where we will study models in which individuals invest in their human capital in order to increase their earnings. In fact, the notion and the name “human capital” comes from the observation that individuals will invest in their skills and competencies in the same way as firms invest in their physical capital—to increase their productivity. The seminal work by Ted Schultz, Jacob Mincer and Gary Becker brought the notion of human capital to the forefront of economics. For now, all we need to know is that labor hours supplied by different individuals do not contain the same efficiency units; a highly trained carpenter can produce a chair in a few hours, while an amateur would spend many more hours to perform the same task. We capture this notion by thinking that the trained carpenter has more efficiency units of labor embedded in the labor hours he supplies, or alternatively he has more human capital. The theory of human capital is very rich and some of the important notions will be discussed in Chapter 10. For now, our objective is more modest, to investigate how including human capital makes the Solow model a better fit to the data. The inclusion of human capital will 98
enable us to embed all three of the main proximate sources of income differences; physical capital, human capital and technology.
For the purposes of this section, let us focus on the continuous time economy and suppose that the aggregate production function of the economy is given by a variant of equation (2.1):

where H denotes “human capital”.
How this is measured in the data will be discussed below. As usual, we assume throughout (often implicitly) that A > 0.Let us also modify Assumption 1 as follows
Assumption 10: The production function in (3.13) is twice continu
in (3.13) is twice continu
ously differentiable in K, H and L, and satisfies

Moreover, F exhibits constant returns to scale in its three arguments.
We also replace Assumption 2 with the following:
Assumption 20: F satisfies the Inada conditions

Moreover, we assume that investments in human capital take a similar form to investments in physical capital; households save a fraction ⅜ of their income to invest in physical capital and a fraction.⅛ to invest in human capital. Human capital also depreciates in the same way as physical capital, and we denote the depreciation rates of physical and human capital by δk and δh, respectively.
We continue to assume that there is constant population growth and a constant rate of labor-augmenting technological progress, i.e.,
Now defining effective human and physical capital ratios as

and using the constant returns to scale feature in Assumption 1', output per effective unit of
With the same steps as in Chapter 2, the law of motion of k (t) and h (t) can then be obtained
as:
and

As in the basic Solow model, we focus on steady-state equilibria with k* > 0 and h* > 0 (if f (0, 0) = 0, then there exists a trivial steady state with k = h = 0, which we ignore as we did in the previous chapter).
We can first prove that this steady-state equilibrium is in fact unique. To see this heuristically, consider Figure 3.1, which is drawn in the (k, h) space. The two curves represent the two equations (3.14) and (3.15). Both lines are upward sloping. For example, in (3.14) a higher level of h* implies greater f (k*,h*) from Assumption 10, thus the level of k* and that will satisfy the equation is higher. The same reasoning applies to (3.15). However, the proof of the next proposition shows that (3.15) is always shallower in the (k, h) space, so the two curves can only intersect once.
PROPOSITION 3.1. Suppose Assumptions 1' and 2 are satisfied. Then in the augmented Solow model with human capital, there exists a unique steady-state equilibrium (k*,h*).
Proof. First consider the slope of the curve (3.14), corresponding to the k = 0 locus, in the (k, h) space. Using the implicit function theorem, we have
(3.16)
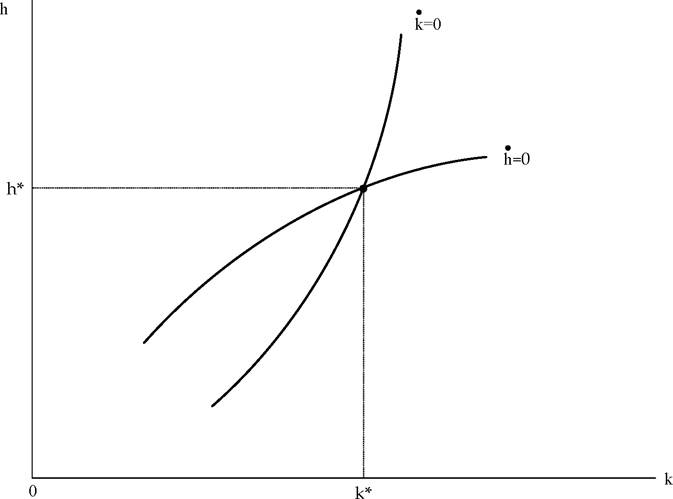
Figure 3.1. Steady-state equilibrium in the Solow model with human capital.
where fk ? ∂f /∂k. Rewriting (3.14), we have s⅛f (k*,h*) /k* — (δk + g + n) = 0. Now recall that since f is strictly concave in k in view of Assumption 10 and f (0,h*) ≥ 0, we have



With the same argument as that used for (3.16), this expression is also strictly positive.
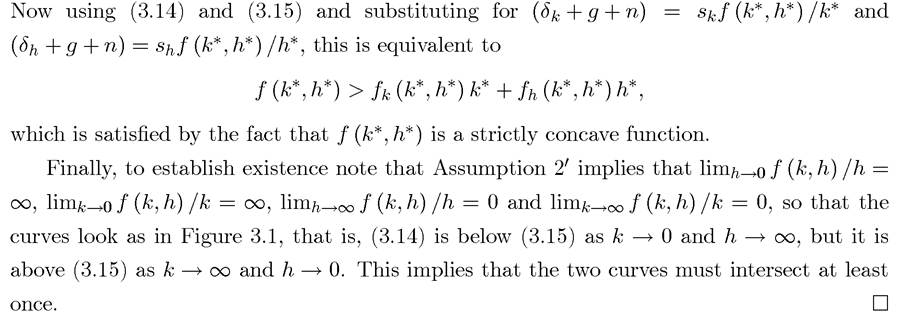
Next, we prove that (3.16) is steeper than (3.17) whenever (3.14) and (3.15) hold, so that can it most be one intersection. First, observe that
This proposition shows that a unique steady state exists when the Solow model is augmented with human capital.
The comparative statics are similar to the basic Solow model (see Exercise 3.7). Most importantly, both greater s⅛ and greater ⅜ will translate into higher normalized output per capita, y*.Now turning to cross-country behavior, consider two different countries that experience the same rate of labor-augmenting technological progress, g. This implies that the country with greater propensity to invest in physical and human capital will be relatively richer. This is the type of prediction can be investigated empirically to see whether the augmented Solow model gives us a useful way of looking at cross-country income differences.
Before doing this, however, we also need to check whether the unique steady state is globally stable. The next proposition shows that this is the case.
PROPOSITION 3.2. Suppose Assumptions 1' and 2 are satisfied. Then the unique steadystate equilibrium of the augmented Solow model with human capital, (k*,h*), is globally stable in the sense that starting with any k (0) > 0 and h (0), we have (k (t),h (t)) → (k*,h*).
A formal proof of this proposition is left to Exercise 3.6. Figure 3.2 gives a diagrammatic proof, by showing the law of motion of k and h depending on whether we are above or below 102
the two curves representing the loci for k = 0 and h = 0, respectively, (3.14) and (3.15). When we are to the right of the (3.14) curve, there is too much physical capital relative to the amount of labor and human capital, and consequently, When we are to its left, we are in the converse situation and
When we are to its left, we are in the converse situation and Similarly, when we are above the (3.15) curve, there is too little human capital relative to the amount of labor and physical capital, and thus h > 0. When we are below it,
Similarly, when we are above the (3.15) curve, there is too little human capital relative to the amount of labor and physical capital, and thus h > 0. When we are below it, Given these arrows, the global stability of the dynamics follows.
Given these arrows, the global stability of the dynamics follows.
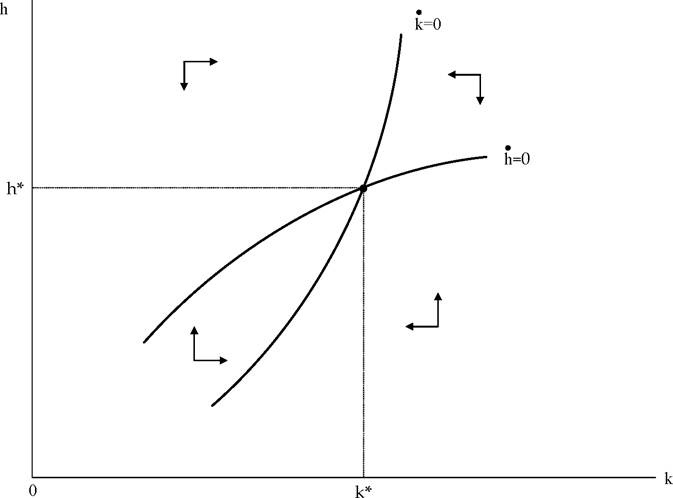
FIGURE 3.2. Dynamics of physical capital-labor and human capital-labor ratios in the Solow model with human capital.
We next characterize the equilibrium in greater detail when the production function (3.13) takes a Cobb-Douglas form.
EXAMPLE 3.2. (Augmented Solow model with Cobb-Douglas production functions) Let us now work through a special case of the above model with Cobb-Douglas production function. In particular, suppose that the aggregate production function is
(3.18)
where 0 functional form, (3.14)
and (3.15) give the unique steady-state equilibrium as
(3.19)
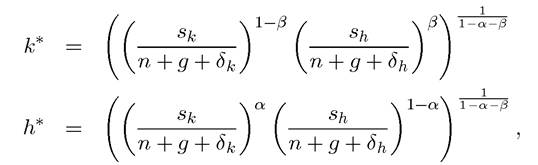
which shows that higher saving rate in physical capital not only increases k*, but also h*.
The same applies for a higher saving rate in human capital. This reflects the facts that the
higher saving rate in physical capital, by increasing, k*, raises overall output and thus the

This expression shows that the relative contributions of the saving rates for physical and
human capital on (normalized) output per capita depends on the shares of physical and human capital—the larger is β, the more important is Sk and the larger is α, the more important is Sh.
In the next section, we will use the augmented Solow model to look at cross-country income differences.
3.4.