A dialogue between the L-view and the S-view
The Generality II required to rationally reconstruct a scientific theory (taken as a Generality I) is a metatheory of science, a view of what scientific theories are, and a method to represent its variegated aspects and component parts.
The standard doctrine of science nowadays, mainly in the field of economic methodology, is what we have called the L-View in Chapter 1. The view that I shall adopt here is known as the structuralist view of theories, which is a rather developed form of the S-View.One of the best and most complete presentations of the L-View is due to the distinguished philosopher Mario Bunge. According to Bunge, the specific trait of scientific hypothetical deductive systems is that their sentences contain factual predicates (Bunge 1974a: 61). A factual predicate refers to real beings like physical bodies or spatial regions. For instance, the predicate ‘x is a particle’, belonging to the context of classical particle mechanics cpm, is factual: it refers to a certain class of physical bodies (or their centers of mass). That is why cpm is a scientific theory, in contradistinction to a purely mathematical or ‘formal’ one like, say, algebraic topology. Another trait of scientific theories is that they must be subjected to empirical testing, and so they require empirical observation and the collecting of empirical data.
Using the example of cpm I will try to explain why there are reasons to move toward SVT. The first problem the L-View has to face is that not all the sentences of a scientific theory have the same degree of generality. For instance, while Newton’s second law ‘F = ma’ holds in every system of cpm, there are other
The structuralist view of theories 39 laws of cpm, like ‘F = -W, that are true only in some of them (this last law holds only in systems of particles with conservative forces). Hence, cpm cannot be defined just as the set of all mechanical laws in general.
Bunge tackles this problem postulating a distinction between a general and a special theory. Thus, cpm would comprise a general theory whose constitutive sentences hold in every particle mechanical system, together with other, more specialized theories that include sentences holding only in some such systems. Therefore, a scientific theory is not exactly a set of statements, but rather a family of such sets, connected in certain ways.
This represents a blow to the metamathematical concept of a scientific theory as a mere set of sentences. At any rate, it would seem more appropriate - if we insist in maintaining a statement view of theories - to think of theories as collections of systems of sentences, since the ‘general’ theory as much as its ‘special theories’ are integral parts of one and the same theory. For instance, the theory of systems with conservative forces is more special than the theory of mechanical systems with distance-dependent forces, which is in turn more general than the theory of systems of freely falling particles. But all these special theories are specializations of cpm, since they share its conceptual apparatus and ‘F = ma’ holds in all of them.
Clearly, if theory T' is more special than theory T, then T C T0. But mere set- theoretical inclusion among families of sentences is not enough to define the specialization relation: according to Bunge, the special sentences introduced in the specializations must be semantically relevant to the assumptions of the more general theory. Roughly speaking, sentence ψ is semantically relevant for sentence φ if φ and ψ refer to the same entities and ψ determines, at least in part, the meaning of φ (cf. Bunge 1974a: 76).
If Γ, Γ are sets of sentences, we say that Γ is more general than Γ (written Γ Γ) iff Γ C Γ and, for every ψ 2 Γ∖Γ, there exists φ 2 Γ such that ψ is semantically relevant for φ.
If Γ Γ, we say that Γ is more special than Γ The special theories may be called regional.Being more general is a partial ordering. If Γ0 is a set of sentences and G = {Γ0, Γ1,..., Γng is a family of sets of sentences more special than Γ0, then (G, >) is a sup-semilattice. Returning to our example, it turns out that there is a set of sentences Γ0 which are true in every mechanical system, or, more precisely, define what a system of classical particle mechanics is, and other sets Γ1,..., Γn which are more special than Γ0. From now on we shall think of a scientific theory T, in a first approach, as a sup-semilattice (G, >). The supremum Γ0 of the lattice will be called the basic theory-element of theory T. We shall see, indeed, that every scientific theory has this structure.
If the former disquisitions are correct, it follows that the logical reconstruction of a scientific theory cannot consist merely of the axiomatization of a set of sentences, except in the limiting case in which it does not contain regional theories. Rather, what is required is the axiomatization of a family of sets of sentences. But there are different ways of axiomatizing systems of sentences.2 Bunge proposes
that scientific theories should be axiomatized within a language of first-order logic, pointing out that
this theory [first-order logic] is necessary and sufficient in order to analyze the concepts, formulas and reasonings that appear in mathematics and science - or rather, to analyze their form. Actually, every mathematical or scientific sentence is, as far as its form is concerned, a formula of that calculus; and every valid reasoning is a particular case of an inferential pattern consecrated by the same theory.
(Bunge 1978: 165; my translation)
We have seen that this position can be defended if we take the language of ARCU as our first-order language and relax it in order to use a more informal language.
For the idea of axiomatizing scientific theories, translating them into a formalized language of any order is not convenient:The practical folly of such formalization is testified to by the fact that the branches of mathematics needed for physics have not been formalized, and the philosopher intent on formalizing mechanics, for instance, would first have to formalize not only the differential and integral calculus, but also the theory of matrices, the theory of ordinary and partial differential equations, and a good portion of the theory of functions of a real variable. (Suppes 1954: 244)
The axiomatization of a scientific theory within the language of informal class theory consists of the definition of a set-theoretical predicate P by means of a list of conditions formulated in that language, whose fulfillment by a structure A is both necessary and sufficient to make true the clause ‘A is a P’. Returning to our didactical example, the basic theory-element of CPM can be be axiomatized as follows.
3.4.1 Definition
A is a system of classical particle mechanics iff there exist P, T, s, m, fi, such that, for every p 2 P and t 2 T:
(0) A ={P, T, s, m,f1,...,fn i.
(1) P is a nonempty set.
(2) T is a closed interval of real numbers.
(3) s: P x T → R3 is a vector-valued function such that d2s(p, t)∕dt2 exists.
(4) m: P x T → R+ is a real valued function taking as values only positive numbers.
(5) fi is a functional of im arguments with values in R3.
(6) For every i there exist (scalar and vector) functions gi,., gi ofp and/ or t, and/or additional particles, and/or additional instants, such that  is absolutely convergent and
is absolutely convergent and
A quick glance at this system of axioms reveals two well-defined sets of sentences.
Axioms (1)-(5) are characterizations of the primitive terms, while (6) is a law properly speaking. This provides the mathematical structure of the basic theory-element, but not its empirical interpretation. This interpretation is not given through axioms, but rather by means of an informal narrative. In the case in point, the empirical intuitive meaning of term P is specified by saying that P must be interpreted as a set of point masses, or macroscopic bodies. Typically, an extensional list of entities is usually supplied in textbooks, but also an intensional description (like “macroscopic bodies not in collision, and not moving at very high speeds with respect to an inertial reference frame”). T is interpreted as an interval of time during which the motion is to be studied. Function s intends to represent the position of the particle in (some subspace of) R3 with respect to a given reference frame that should not be rotating with respect to the fixed stars. Function m represents the mass of the bodies along time T, and each fi is a function measuring the force exerted upon each particle in each instant. Notice that endowing with empirical meaning the terms of a theory requires a rather complex narrative that presupposes a lot of information about the entities the theory deals with. This narrative solves the problems of lost beings, unavailable stories, and lost content. A proper logical reconstruction of a scientific theory must be accompanied by a narrative that makes explicit the empirical meaning of the terms. Each kind of application must specify the kind of beings to which the theory is being applied, the specific story behind the application, and in this form the content is made entirely explicit. It is not enough to provide the mathematical structure of the theory, and the physical, economic, biological, or other type of meaning cannot be reduced to mathematical or logical meaning.In spite of the convenience of using set-theoretical predicates in order to provide axiomatizations of theories, Bunge rejects explicitly the usefulness of the concept of model or structure in the empirical sciences (Bunge 1978: 1501, 1974b: 9-12).
The reason he adduces is, essentially, that empirical theories are not “completely true”, since they involve simplifications. But, he adds, the concept of a model would be useful only if the formulas of the theory were satisfied in an exact way by their referents (Bunge 1972: 49).Let us discuss this notion, in connection with our particular example, and consider the conditions under which Newton’s second law (nl) would be exactly satisfied by its referents. According to Bunge (1974a: 52), “the reference class of a quantified formula equals the reference class of the predicate occurring in the formula”. According to this rule, the reference class of nl is the reference class of the binary predicate ‘=’, namely the specific set over which the identity relation is defined, which in this case is the vector space R3 over the field of real numbers. Thus, nl is exactly satisfied by its referents iff, for every particle p 2 P and every instant t 2 T, vector ds2/dt2 multiplied by scalar m(p, t) is strictly identical to true position of particle p at t, and F is the sum of the exact and true values of all the forces acting upon p at t.
by scalar m(p, t) is strictly identical to true position of particle p at t, and F is the sum of the exact and true values of all the forces acting upon p at t.
One problem that the former approach has is that the idea of an exact and true value of a magnitude does not have a clear meaning, given the continuous random fluctuations of the magnitudes.3 But Bunge takes these variations into account pointing out that the magnitudes of the concrete systems have an exact and true value in each instant with respect to a system of measurement units (Bunge 1969: 773-80). That is why, for Bunge, “all theoretical sentences are, in the best cases, good approximations - and we expect we may improve upon them” (Bunge 1974b: 105). What all this boils down to is that a theoretical sentence is only approximately satisfied by the true and exact values of their corresponding magnitudes. This implies that a relational structure whose functions assign to the given entities the true and exact values of the relevant magnitudes could not be a model of the theory.
Representing theories by means of relational structures does not preclude seeing theoretical sentences as approximations to unknown truths about the world. It is only a way of representing how the practice of the sciences is actually carried out, at least in some of its aspects. Actually, just as many people speak in prose without knowing it, scientists build models unaware of the fact that they are doing so. Let us take a simple example to illustrate this claim.
Consider a typical textbook problem in classical mechanics, the problem of explaining the motion of a brick sliding on an inclined plane; that is to say, the problem of obtaining, by means of Newton’s laws, a quantitative description of the motion of brick p along the inclined plane. Now, suppose that the plane has a length of 60 cm and forms an angle α with respect to the horizontal. The brick weighs W = 1 kilopond and slides from position A to B (see Figure 3.1).
In order to solve the problem, a reference frame is fixed with rectangular coordinates xyz, assuming that the motion takes place in the plane yz (see Figure 3.2). The time that it takes for p to pass from A(0, 0, z) to B(0, y, 0) is represented by means of an interval T = [0, t*] of real numbers, where t is a magnitude, to be determined numerically, that indicates the number of seconds that the motion lasts.
The problem is solved once we get a vector function s(p, t) that gives the position ofp, on segment AB, for each second t 2 T The assumption that is practically
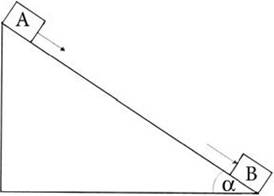
Figure 3.1 Bnck sliding on an inclined plane
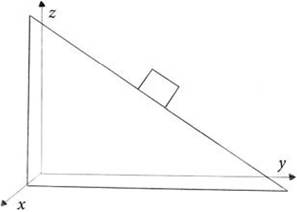
Figure 3.2 Reference system for the plane
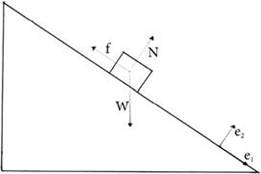
Figure 3.3 Forces operating on the brick
made by the physicists4 is that there are only three forces acting upon p: force W (the weight of the brick) directed to the center of the earth and orthogonal to plane xy; force N, normal to the inclined plane, which is the force that the plane exerts upon the brick; and the force of friction f, opposed to the motion (Figure 3.3). Clearly, this assumption is an idealization, since it is neglecting the many other forces acting upon the brick. Now, if μ is the friction coefficient, e1 = (0, cosα, sinα) is a unit vector parallel to the inclined plane, and
Therefore,
ds = g(sin α — μ cos α)t dt
and so,
The last formula provides the vector function of the position we were looking for. It is possible to obtain experimentally, out of it, a numerical value of the friction coefficient μ. The brick is left to slide several times, and we observe the distance from A to the brick at a given instant, say t = 1. If this distance is (say) 10 cm, then we take the value of constant g (981.4 cm/s2) and, substituting and solving for μ, we get μ = 0.553.
Once the value of μ is obtained, it is possible to compute the total duration of the motion of the brick by means of the position function. Solving for t we get
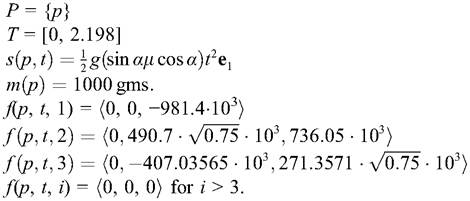
But, since the total distance traversed by the brick is a known datum (50 cm), the whole duration of the motion is found to be 2.198 s.5 The available empirical data allow us also to compute the acting forces upon the brick. Since the weight of the brick is 1 kilopond = 981,400 dynes, its mass is equal to 1,000 grams, and so we can express the forces acting upon the brick as follows: 
In this way we have obtained the structure A = (P, T, s, m, f), where p is the brick and
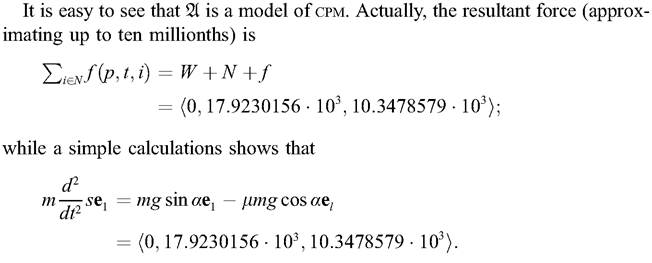
Thus, NL is exactly satisfied by its referents, precisely because it is assumed to be so, in order to integrate the motion out of the forces. Quite a different thing is the description of the motion obtained by means other than Newton’s laws. It is clear that in classical mechanics forces are taken as the (efficient) causes of motion. Typically, a kinematical concept ‘merely’ provides a description of some phenomenon, whereas the dynamical one provides an explanation of the phenomenon in terms of certain relevant causes. In the example considered above, a kinematical representation of the inclined plane is just a description of the motion, obtained from a series of observations, of the brick sliding along the plane. The dynamical representation, on the other hand, is obtained by integrating the forces acting on the brick. This example suggests a general distinction within any theory T, to wit, between its kinematical part, which is normally elaborated independently of its dynamical part, and the dynamical conceptual apparatus, which allows the generation of representations of the phenomenon originally described by the kinematical part. In order to avoid mechanical language, let us call the ‘dynamical’ part of theory T the T-theoretical part, and the ‘kinematical’ one the non-T-theoretical part. Clearly, what counts as theoretical depends of the particular theory that is being considered. The notion of non- T-theoretical should not be assimilated to the concept of observational, although the development of non-T-theoretical representations always involves empirical observation.
An example in economics of the distinction just introduced is the distinction between the ‘observed behavior’ of an agent and the attempt to explain that behavior in terms of the concept of preference. The observed behavior is recoded in a certain structure C and the explanatory apparatus is a series of assumptions defining a structure P that represents the preferences of the agent. Out of P a representation C of the behavior is generated and the explanation is considered successful if C approximates C to an acceptable degree.
The former example illustrates the way in which particular models of a theory T are built. In the case of theories containing mainly metric concepts, a model is built when particular numerical values of the concepts are determined for the particular concrete system to which the theory is being applied (in this case the particular physical system consisting of the inclined plane and the brick sliding on it). That is to say, the corresponding magnitudes of the objects are measured (like the mass of the brick). This remark will be relevant when we discuss measurement below. But notice that measurement is a special case of a more general activity, which is that of determining relations for a particular concrete target system. In the case of theories not having metric concepts, models are built by means of the determination of the relations constituting its conceptual apparatus; i.e. by a specification of the particular ordered tuples belonging to the relations.
We shall see that the specification of relations and metric concepts sometimes requires essentially the use of the laws of the theory, so that they cannot be determined without presupposing that such laws are true of their intended objects. If concept R cannot be determined in any application without presupposing the validity at least of the fundamental law of theory T, we say that R is T-theoretical. In such a case we also say that R is determined in a T-dependent way. For instance, it is apparent that it is impossible to measure a particular mechanical force without presupposing NL, while the position function - at least in some applications - can be found independently of the dynamical laws. This will have consequences for the idea of a general theory of measurement.
Returning to our example, it is clear that the motion of the brick along the inclined plane can be represented by a structure whose construction does not require at all the use of mechanical laws. There are observation methods that allow the determination of the motion of the brick with certain precision. Let P = (P, T, s) be a structure thus obtained, with
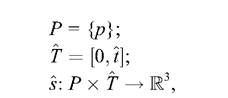
where t* is the number of seconds during which the motion is observed to take place, and ^s is a curve obtained from the observation of the motion of the brick. It is clear that P satisfies axioms (1)-(3) of definition 3.4.1.
Notice that the type of P is different from that of A. The question is, then, How can they be compared? ‘Kinematical’, i.e. non-T-theoretical structures, will form part of larger structures comprising them together with the ‘Dynamical’, i.e. T-theoretical part. svt calls the non-T-theoretical parts “partial potential models”. The comparison is made between a partial potential model obtained out of the T-theoretical concepts, by means of the laws of T, with a previously given partial potential model that recodes observations obtained independently of T. Hence, using CPM and the relevant empirical data, we obtained the partial potential model

The comparison that has to be made is between this structure and structure B. A will be deemed a successful application of T to the phenomenon of the inclined plane if it is the case that function s approximates function S to a reasonable degree; i.e. if ∣t -t∖ < δ and ∣s(p, t) — t(p, t)∣ < ε for certain ε, δ >0 and for every t in the interval [0, min (2.198, t)]. Clearly, theory T may fail to approximate a kinematical structure B, but this does not mean that the theory has been refuted, since it may be successful in the explanation of other phenomena.
3.5