Soundness Examples
In Chapter 2 we looked at a handful of justification logics: LP and various sublogics in Section 2.6, and other less common justification logics in Section 2.7. We now examine Fitting models for these justification logics, and verify soundness.
4.3.1 J(CS)
Assume the logic J(CS) is built on J0 from Section 2.3, with constant specification CS added. No special assumptions are placed on CS. Consider a Fitting
We now have that all theorems of J(CS) are valid in any Fitting model meeting constant specification CS. This means we can show unprovability  variable). We construct two different countermodels for it. These are illustrative of some of the ideas behind the semantics. A formula t:X might fail at a possible world either because X is not believed there (it is false at some accessible world), or because t is not an appropriate reason for X. The two models illustrate these alternatives. To keep things uncluttered, we assume CS is the empty constant specification so we can ignore the role of justification constants in what follows.
variable). We construct two different countermodels for it. These are illustrative of some of the ideas behind the semantics. A formula t:X might fail at a possible world either because X is not believed there (it is false at some accessible world), or because t is not an appropriate reason for X. The two models illustrate these alternatives. To keep things uncluttered, we assume CS is the empty constant specification so we can ignore the role of justification constants in what follows.
The second model M2 again has a single state Γ accessible to itself. This time use the valuation V that assigns {Γ) to every propositional letter. It follows that both P and are true at Γ. The evidence function is somewhat more
are true at Γ. The evidence function is somewhat more
4.3.2 LP
The first justification logic was LP, the Logic of Proofs.
It is presented axiomatically in Section 2.6. To get a Fitting semantics for it we build on that just introduced for J. For the following, M = {Q, R, V, &) is a Fitting model for J to which we add extra conditions on accessibility and evidence.Factivity is captured axiomatically with the scheme t:X → X. Modally, ?X → X corresponds to the semantic condition of reflexivity on Kripke models, and the same is the case for justification logics. It is easy to check that the Factivity scheme is valid in all Fitting models in which accessibility, R, is a reflexive relation. We use JT when referring to this logic, semantically or axiomatically (a completeness theorem will be shown soon, so there is no ambiguity between axiomatics and semantics here).
Positive Introspection modally is given by the axiom scheme ?X → ??X, which corresponds to a transitivity requirement on accessibility. The modal logic thus characterized axiomatically or semantically is called K4. For a justification counterpart a unary operation symbol, !, is added to the language and
one adopts the axiom scheme For Fitting models transitivity is
For Fitting models transitivity is
needed but is not enough. The justification analog of K4 is called J4, and semantically one requires that accessibility, R, be transitive on G, as in the modal case, and in addition we want the following.
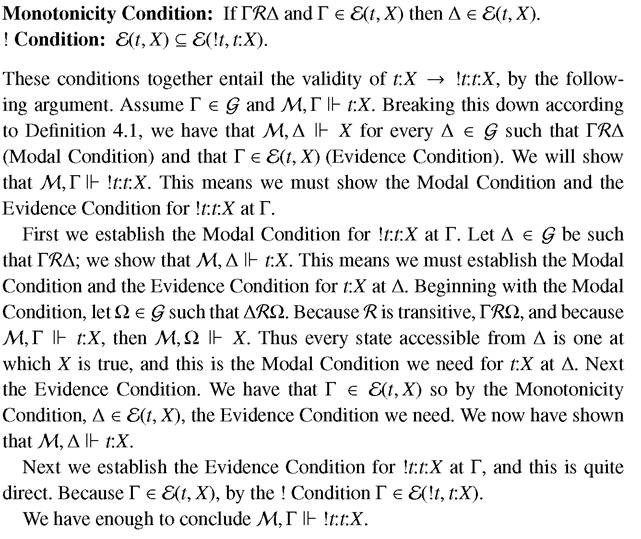
LP is the combination of JT and J4, and so is sometimes known as JT4. The name LP is retained for historical reasons. Semantically one assumes reflexivity and transitivity of accessibility, the Monotonicity Condition, and the ! Condition.
4.3.3 K43 and J43
Modal K43 and justification J43 were introduced axiomatically in Section 2.7.1. Following Chellas (1980), in a modal model with possible worlds Γ and A and 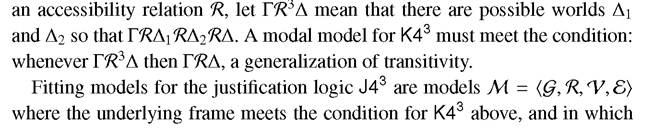
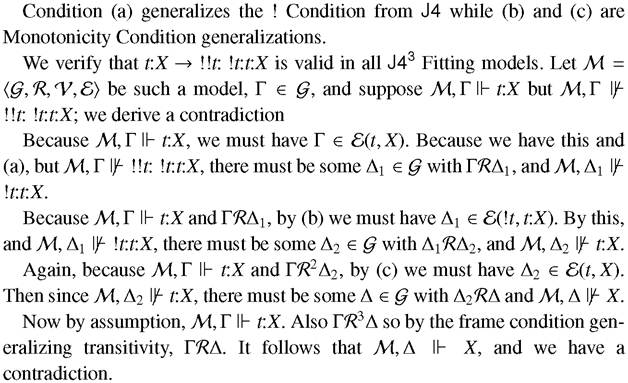
the evidence function meets the following conditions, generalizing from ! to !!.
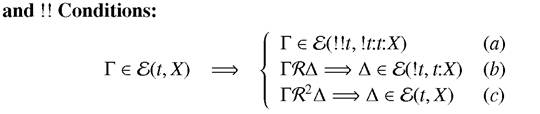
4.3.4 S5 and JT45
We have seen semantics for justification logics that are sublogics of LP, corresponding to sublogics of the modal logic S4. Historically, the first justification example that went beyond LP was JT45, corresponding to modal S5. It was discussed axiomatically in Section 2.7.2 and involves a negative introspection operator, “?”. There are three semantic conditions needed for this operator. First, the accessibility relation R should be symmetric, similar to S5 Kripke modal models. Here are the other two conditions, which have no modal analog.

If these conditions are added to those for LP we have a semantics for the justification logic JT45. (If the conditions are added directly to J, the corresponding logic is called J5.) Notice that the ? Condition is stated with a negative antecedent. Understanding how to handle this was a major breakthrough. Our formulation is from Rubtsova (2006a, b), with a similar approach given in Pacuit (2005, 2006). The most significant new thing is that a Strong Evidence
4.3.5 Sahlqvist Examples
We give semantic counterparts to the axiomatic presentation in Section 2.7.3. 
4.3.6 S4.2 and JT4.2
transitive, and convergent, as with S4.2, we have the LP requirements, the Monotonicity Condition, and the ! Condition from Section 4.3.2, E is a Strong Evidence function, Definition 4.5, and we have the following.
Geach Condition:
This material will be revisited in a much broader setting, in Section 8.2. A separate chapter is required because of both length and significance.
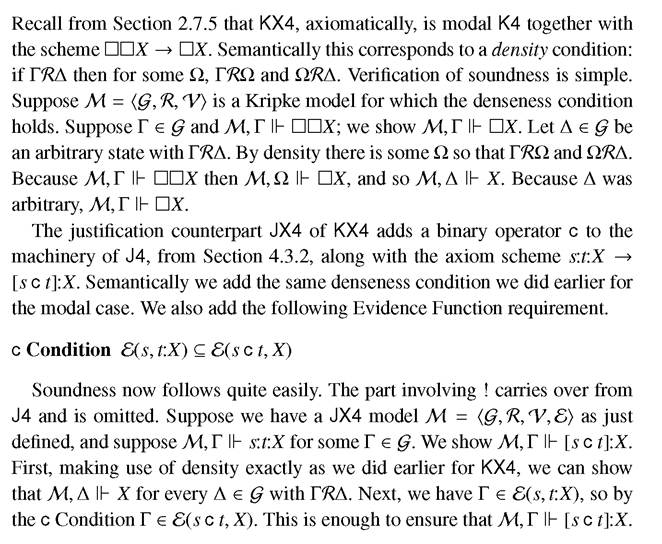
4.3.7 KX4 and JX4
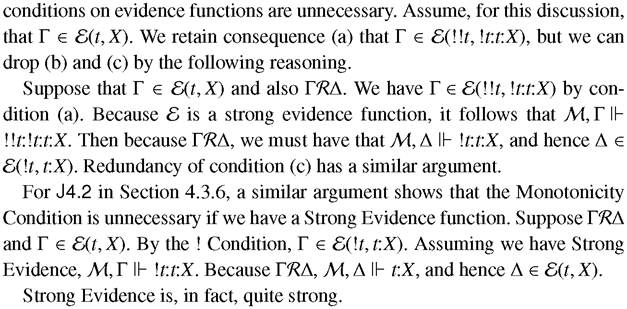
4.3.8 A Remark about Strong Evidence Functions
Imposing a strong evidence assumption can sometimes make other requirements on a model redundant. For instance, if we restrict the semantics for J43 from Section 4.3.3 to models with strong evidence functions, two of the three
4.4