The S-view in action: an example
In order to illustrate the S-View, let us consider a rather general theory: individual choice theory. Just as classical dynamics proposed to explain the motion of bodies by means of the concept of force, individual choice theory proposes to explain the behavior of the agent by means of the concept of preference.
The description of the behavior of the agent is the ‘kinematics’ of the theory, while the preference relation constitutes the ‘dynamics’ by means of which the former is explained.The ‘kinematics’ intends to describe all the circumstances in which the agent is bound to make a choice of a certain type, as well as the choices that the agent would make under such circumstances, by means of unspecified but invariant decision rules. The choice circumstances are represented by subsets of a fixed set of options X, called ‘opportunity sets’. The opportunity sets B are collected in a family B which represents the collection of all the possible choice circumstances. The choices that the agent would actually make at the circumstances are described by means of a function η: η(B) is the choice (or set of choices) the agent would make, according to his decision rule, if he found himself in circumstance B.
This conceptual apparatus can be formulated by means of the definition of a set-theoretical predicate. The predicate is defined through a set of necessary and sufficient conditions divided into two classes: characterizations, which are so called because they just characterize the set-theoretical nature of the terms, as well as additional ones specific to the object to be represented. Sometimes the predicate adopts the name of the object represented, if care is taken to make it clear that nobody is confusing reality with its representation. Let us call ‘choice structure’ this one.
1.2.1 Definition
C is a choice structure iff there exist X, B, and η such that
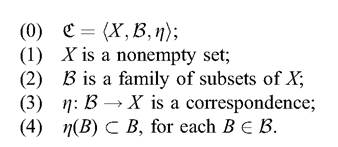
‘C is a choice structure' is the set-theoretical predicate with letter ‘C performing as a variable: Any thing that satisfies the conditions is a choice structure, and any choice structure has to satisfy the conditions. Condition (0) just exhibits the similarity type of the structures satisfying the predicate, (1)-(3) are the characterizations, and condition (4) is not a characterization, but states the obvious truth that options are to be chosen among those that are available.
The ‘dynamic’ part of the theory is provided by a concept of preference defined over the set X of options, as characterized by the following definition.
1.2.2 Definition
P is a regular preference structure iff there exist X and ≥ such that 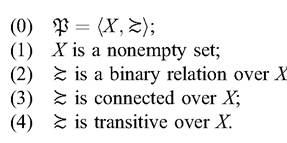
1.2.3 Definition
I is an individual choice structure iff there exist X, B, η, and ≥ such that
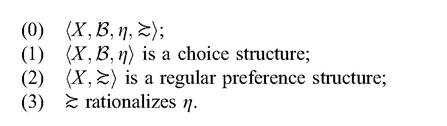
Axioms (1) and (2) are a compact way of writing down the characterizations, but (3) is properly an axiom. It says that the agent is actually maximizing a preference relation when he makes his choices.
A data-structure for an individual choice structure C is a system of the same similarity type as that of C that recodes observations about a single agent during some specified interval of time. Out of the observation of the behavior of the agent, the data-structure
is obtained, where η is a function defined over the finite set B of actually observed choice circumstances presented to the agent during the time interval. η is a recording of the choices that the agent was observed making. Since the size of B C B is manageable, the observations can be recorded in a table (see Table 1.1). The data are explained if D can be isomorphically imbedded in the choice structure C generated by some preference structure.
1.3