The geometric theory of difference
It is nearly impossible to formulate differentiability conditions over R within the language and conceptual apparatus of the algebraic theory of difference. What is required is a certain ‘intermediate’ language.
In order to introduce this language, let us suppose that a good straight Euclidean line is given in its purity. Following Holder (1996, 1997), I shall assume that intervals within this straight line are of two kinds, such that any interval is of one and only one kind.
It is possible, and it will turn out to be convenient, to express the properties that are attributed to R in terms of relations among geometric intervals within the given Euclidean straight line. What this means is that we, as theoreticians, can represent the comparison of the differences felt by the consumer, expressed by symbol ‘R’, by means of comparisons among intervals in Λ. My proposal is to build the theory of relation R by means of these comparisons, trying to express intuitive, empirical (idealized) properties of R in terms of such comparisons.
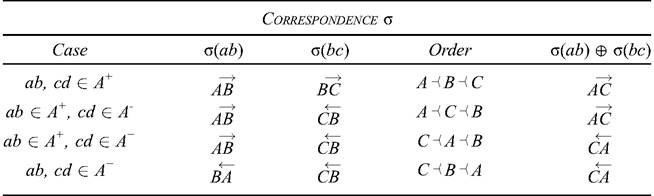
To that end, let me introduce the function s: Ω2 → Λ, as an application that assigns to each satisfaction interval ab the equivalence class of all the line intervals whose length is intended to represent the distance that the agent associates to ab (how ‘far’ is a from b in terms of satisfaction), and whose direction is intended to represent whether the motion from a to b would be an improvement, a worsening, or indifferent for the agent. In particular, σ will assign to any interval aa in the diagonal the (equivalence class of the) null line interval, which of course does not exist but we can create by a convenient fiat.
If l represents (on the straight line) the motion from option a to b, and m represents that from b to a, the addition of l and m must be the null interval.
The sum of any equivalence class l with the null segment must leave l invariant. There are three cases of addition of non-congruent intervals. In the first case, both intervals are of the first direction, in the second they are of opposite directions, in the third both are of the second direction. The second case has two subcases: the interval of the second direction is greater in length that that of the first, or the other way round; thus, we have to consider four cases overall.7.5.1 Definition
Let Λ be the family of equivalence classes of elements of Λ modulo =, including the class of the null vector AA, which we shall denote as e. We define the binary operation ®, closed over Λ, by means of the following conditions: 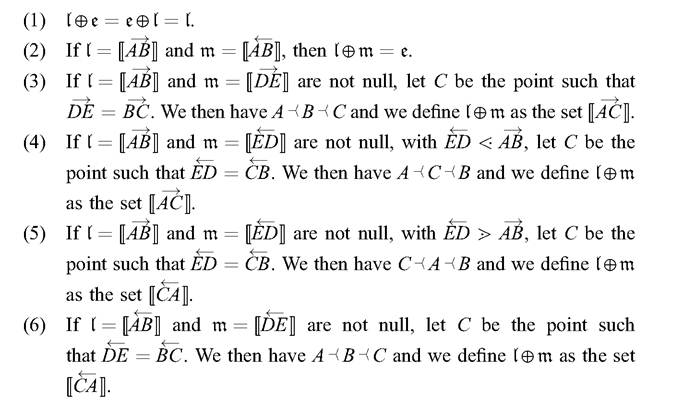

7.5.2 Theorem
Structure (Λ, ®, e) is an Abelian group totally ordered by ≤, with e as identity element.
PROOF: A rigorous proof can be given using Definition 7.5.1 and the conceptual apparatus and axioms of Holder’s theory (Holder 1996, 1997), a task that is involved, as it requires lengthy arguments and the consideration of several cases. For example, the proof that ® is associative is tedious, as eight cases 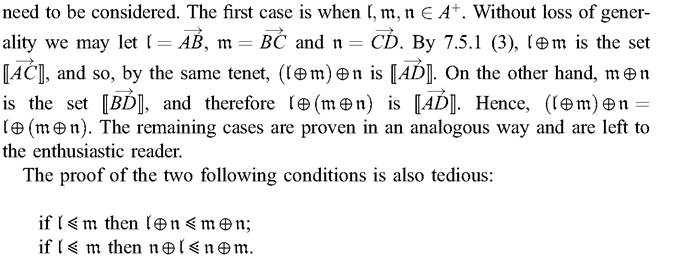
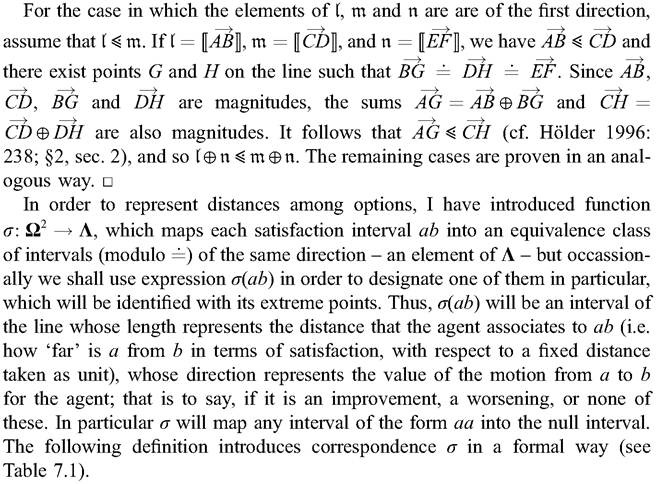
Table 7.1 Representation of motions by means of σ
7.5.3 Definition
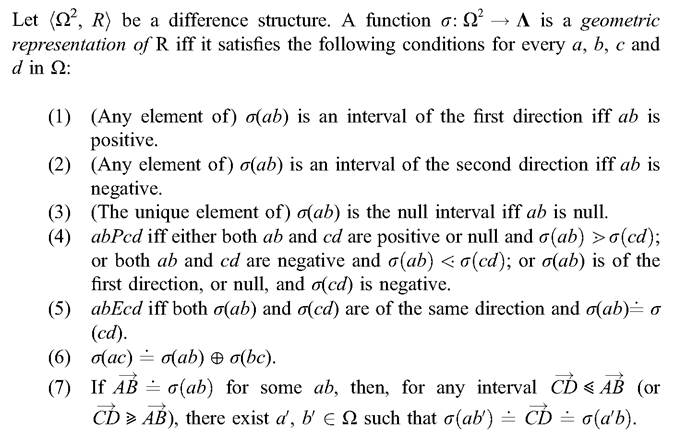
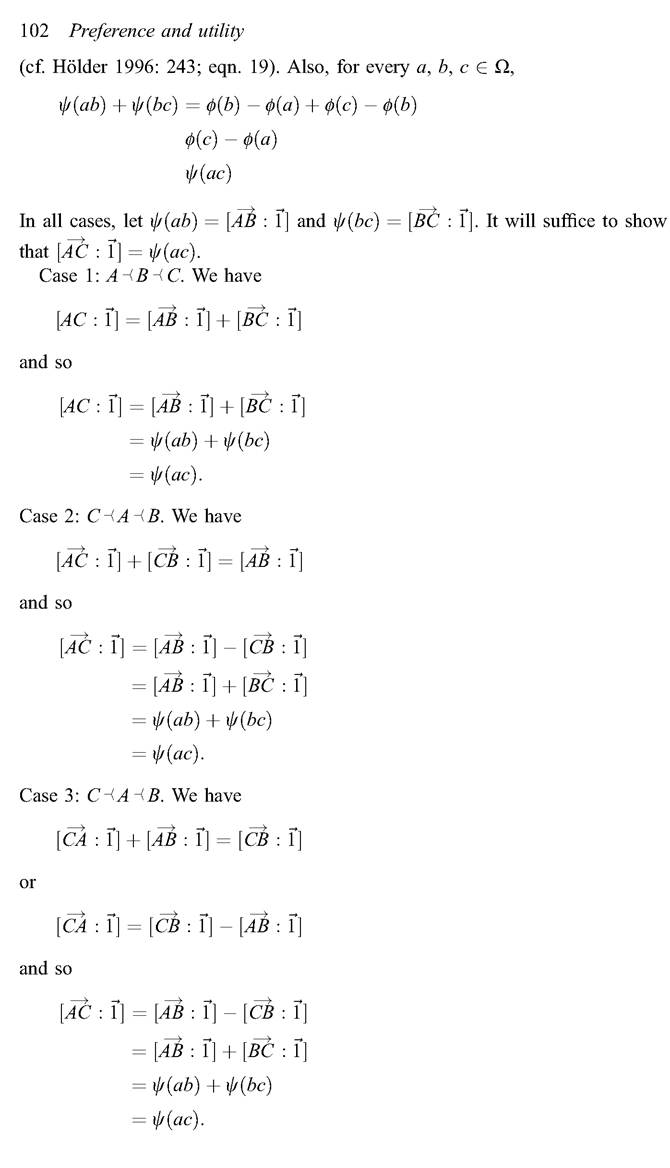
The following result is immediate, as it is based upon the existence of the already mentioned numerical representation.
7.5.4 Theorem 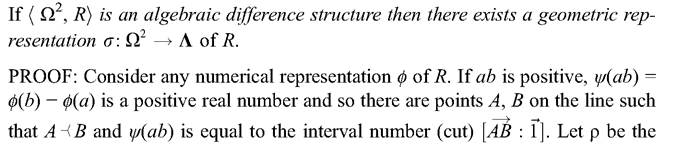

I will prove in what follows that the existence of a geometric representation of difference structure D implies that D is an algebraic difference structure.
The following four lemmas, all of which share the assumption that such representation exists, are devoted to this end. I will introduce later the differentiability condition. For the sake of brevity, from now on, that an interval is of the first direction will be expressed by saying that “it is I”; and that “it is II” if it is of the second direction. The null interval will be denoted as 0.7.5.5 Lemma
If abRcd then dcRba.
PROOF: Suppose that both ab and cd are in A+ U A0. This means that both σ(ab) and σ(cd) are I or null, with σ(ab) > σ(cd). Hence, σ(ba) and σ(dc) are II or null, with σ(ba) > σ(dc). It follows that dcRba.
Ifboth are II, abRcd implies that ab⅛cd and that ba and dc are I. Hence, again, dcRba.
Notice that abRcd implies that cd cannot be I or null if ab is II. Hence, the only remaining case is when ab is I or null, and cd is II. In this case, ba is II or null and dc is I. It follows that dcPba and so, finally, dcRba. ?
7.5.6 Lemma
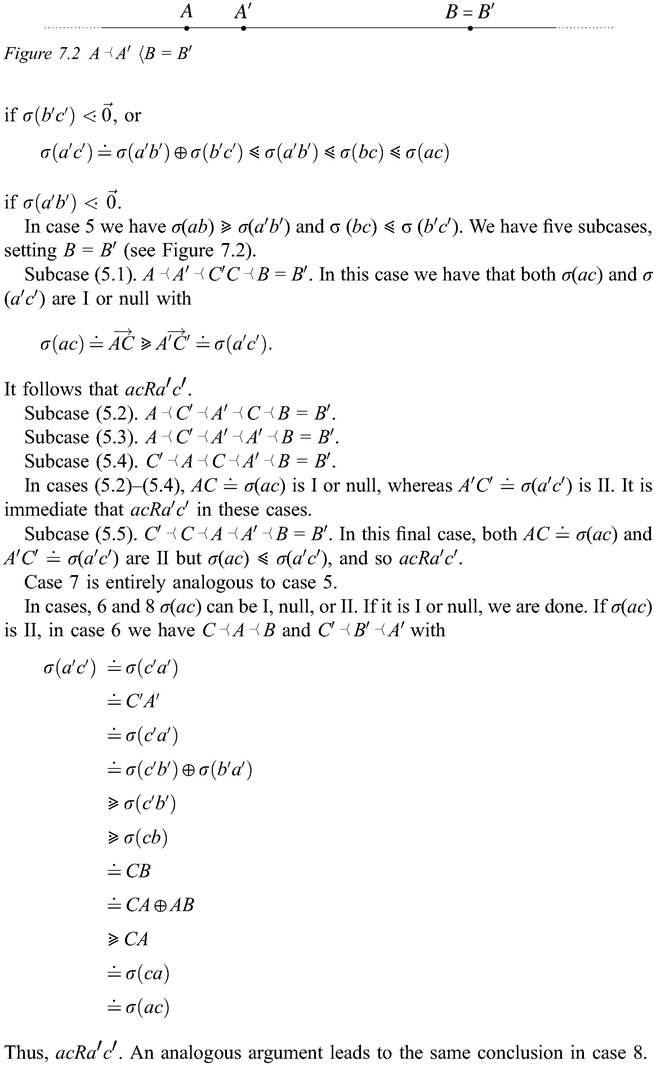
If abRa'b' and bcRb'c' then acRa'c'.
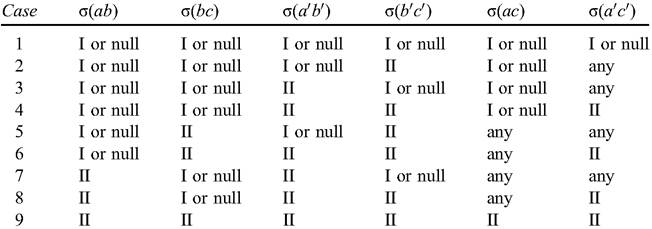
PROOF: The proof of this lemma is easy but laborious, since there are several cases to be considered. Excluding the cases precluded by the hypothesis of the proposition, there are still nine cases to consider. They are given in Table 7.2. The proof is interesting because it yields more insight into the meaning of the geometric representation. 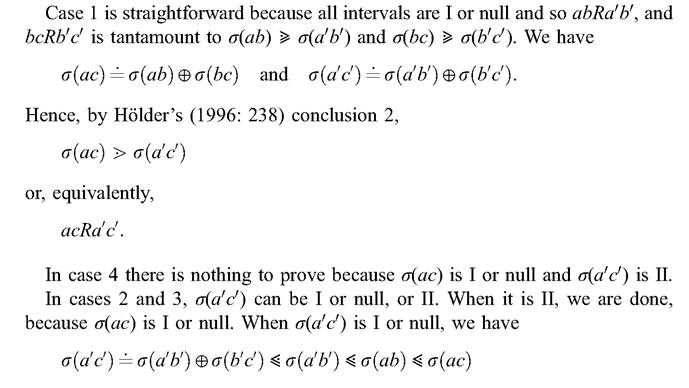
Table 7.2 Feasible cases in Lemma 7.5.6
feasible Casesinlemma 7.5.6
The great advantage of the language of intervals over the languages typically used to formulate preference theories is that it provides resources by means of which we can also express natural, intuitive differentiability conditions for the preference relation. We turn now to these.
More on the topic The geometric theory of difference:
- Adolfo Garcia de la Sienra. A Structuralist Theory of Economics. New York, USA: Routledge,2019. — 235 p., 2019
- Transforming the Politics of Difference
- Ending Empire, Redefining Difference
- Statistical Approaches
- DIFFERENT FACETS OF INEQUALITY
- MOBILITY MEASUREMENT
- The information age
- Growth and development
- DATA
- THE POSITIVE ECONOMICS OF INCOME DISTRIBUTION